при использовании сортировочной машины мы узнаем визуальную систему опознавания сортировочной машины. В этой системе мы можем точнее определить местоположение токовых элементов, платы или сопла. оборудование для сбора и укладки обеспечивает более точный метод сбора и укладки.
и во многих случаях, когда мы используем устройства для сбора и установки, чтобы завершить операции по установке, из - за наших неправильных настроек или обнаружения ошибок, компоненты, которые должны быть собраны и помещены, отклоняются. Это результат, который мы не хотим видеть, так как мы должны решить проблему смещения компонентов? Знаешь, как формируется эта система? Дай \ \ \ \ \ 35обобщить Давай посмотрим вместе.
(1) подбирать и помещать машину на верхней части камеры головы, как правило, с помощью линейных датчиков технологии. в процессе подбора и перемещения головок и укладки их можно обнаружить в указанном месте. Это может значительно повысить точность и эффективность установки. в целом система состоит из двух модулей: модуля источника света, состоящего из источников света и линз. линзы с источником света образуют модуль передачи света.
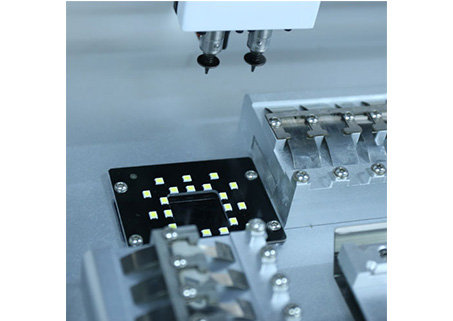
(2) при сборке и размещении машины под машиной есть камера сверху вниз, которую мы можем использовать для определения местоположения деталей, когда камеры опознавания системы установлены между местоположением подобрания и монтажа, когда камера работает, она может одновременно улавливать и обрабатывать видео, Таким образом, сокращается время сборки и установки машин.
(3) лазерная система наведения. Мы можем использовать эту систему для измерения размера и формы частей, собранных и помещенных на машинную систему. его преимущество заключается в том, что установка осуществляется быстрыми темпами и высокой точностью. недостаток заключается в том, что невозможно проверить штифт и узлы с натяжными штифтами.
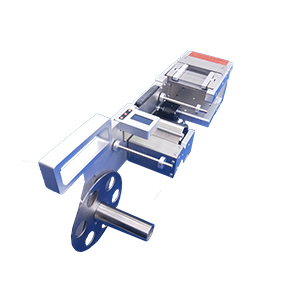
(1) нам нужно изменить конфигурацию аппаратных средств, изменить направление и расположение сборок и укладки головки, всасывания сопла, а также подобрать и разместить машину. если использовать этот метод, то конечный эффект и точность установки и установки машины будут невысокими. Этот метод может быть использован для продукции без высокой точности. Если требуется точность, мы будем использовать другой метод.
(2) мы должны использовать систему опознавания для выполнения идентификационной работы, в программном обеспечении системного управления, чтобы изменить положение горизонтальных и вертикальных осей, а также изменить направление и положение сопла. В большинстве случаев этот метод может быть использован при переработке.
(3) Это также является первым процессом идентификации, а затем простой обработки горизонтальных и вертикальных осей и всасывания сопла. Следующий шаг - починить систему опознавания. для того чтобы подобрать и поместить компоненты через систему опознавания, можно выполнить функцию идентификации изображений, что позволит осуществлять их считывание и размещение в машинах.
 English
English 日本語
日本語 한국어
한국어 français
français Deutsch
Deutsch Español
Español italiano
italiano русский
русский português
português العربية
العربية tiếng việt
tiếng việt